『纳米传感器』北京纳米能源所制备出透明可拉伸自驱动触觉传感器
随着人工智能技术的发展,涌现出各种模仿人体特征的可拉伸电子器件、可穿戴电子设备以及电子皮肤等革命性功能产品,已经引起研究人员的极大关注。它们可以像人体皮肤或组织一样柔软且富有弹性,从而可以前所未有的方式与人体紧密结合,实现许多现在实现不了或者甚至还无法想象的功能。同时还可以进一步提高人类的健康水平和生活质量,极大地给我们的生活带来便利,因此人们相信这些产品将在未来人机互动、电子皮肤、健康医疗等领域有着新的应用和突破。
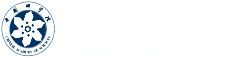
目前,对于透明可拉伸导体以及电子器件已经有了诸多研究,包括采用一定的几何构型、使用本征可拉伸导体以及使用弹性体复合材料以提高器件的可拉伸性能。然而,制备大规模集成、透明且可拉伸触觉传感器依然存在一定的挑战。近日,中国科学院北京纳米能源与系统研究所潘曹峰研究团队,基于摩擦纳米发电机原理,研发制备了一种透明可拉伸触觉传感器(Triboelectric Tactile Sensor, TETS)。该器件兼具高透明度、高压力敏感性、可拉伸性以及多点触控操作,能够同时实现生物机械能收集、触觉感知等功能,为制备透明可拉伸触觉传感器提供了一个全新的视角,研究成果发表在近期的Adv. Mater.上(DOI: 10.1002/adma.201706738)。
研究人员利用静电纺丝技术制备大面积的PVA纳米纤维薄膜,随后获得Ag纳米纤维,其具有优良的电导率及透光性(1.68-11.1Ω sq-1,透光率大于70%)。随后通过器件设计,以及微加工以及湿法刻蚀等工艺,制备获得高透明度、高压力敏感性、可拉伸性触觉传感器。该方法操作简单、成本较低,且易于大规模制备。研究人员探索了不同取向的Ag纳米纤维对器件的拉伸性能,解释了器件在拉伸状态下的荷电传导机制。实验发现,其制备的随机取向的Ag纳米纤维,在100%的拉伸下电阻改变量仅有10%,并可探测低至4.4Pa的压力且具有约70ms的响应时间。另外,通过采用优化的交叉阵列结构,其8 × 8的阵列触觉传感器可实现不规则平面的实时轨迹探测。因此该类器件具有广阔的市场前景,在人机交互、自驱动机器人、柔性显示屏和可穿戴电子设备中有潜在的应用价值。
来源:中科院北京纳米能源与系统研究所
附件下载: