苏州纳米所在纤维驱动器的弹性驱动机制及应用方面取得新进展
生物肌肉具有弹性驱动特性:即在可承受的载荷和应变条件下完成工作后,肌肉可以完全恢复至原来松弛状态的长度。这一特征与刚性骨骼结构形成良好适配,以完成复杂的运动场景需求。然而,目前发展的人工肌肉纤维驱动器尚不具备该特性,主要是因为纤维驱动器在变负载驱动过程中存在塑性伸长现象,尤其是在重负载下。这一问题严重限制了人工肌肉纤维驱动器的驱动精度、重复性以及实用性。
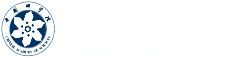
为此,苏州纳米所研究团队基于低成本纤维材料设计了一种尼龙@聚二甲基硅氧烷(nylon@PDMS)人工肌肉纤维。该人工肌肉纤维在经历不同负载驱动的切换后,能够恢复到初始状态,并可再现负载变化前的驱动特性,即表现出和生物肌肉类似的弹性驱动特性。纤维的聚二甲基硅氧烷外层对弹性驱动起到至关重要的作用,并赋予纤维良好的弹性拉伸性能。低成本聚合物原材料的使用,为弹性人工肌肉纤维的商业化发展奠定了基础。
基于该弹性驱动机制,团队设计了一种人工肌肉纤维拮抗驱动舵机,用于替代商用扑翼机尾部的电控方向舵,实现飞行方向控制的同时降低了系统重量。此外,团队还构建了一种可自主调节压力的智能压力带,具备主动节律性加压和实时压力监测功能,在医疗领域展现出潜在应用前景。
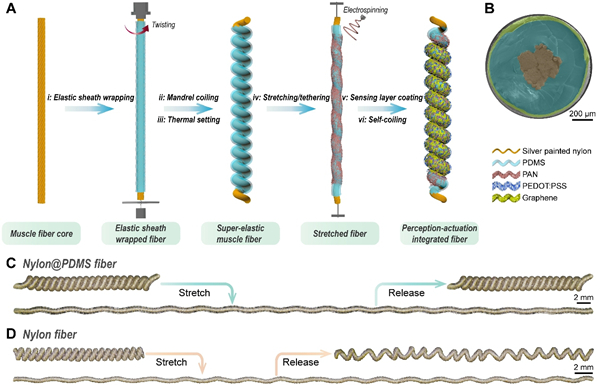
图1 感知-驱动一体化弹性人工肌肉纤维的结构设计、制备和表征
弹性人工肌肉纤维连续变负载驱动测试中,逐步增加相同的负载,然后又逐步减小相同的负载,在变负载工作前后同一负载下纤维长度和收缩量几乎不变。而非弹性人工肌肉纤维则存在塑性变形,导致长度增加,驱动量减小。
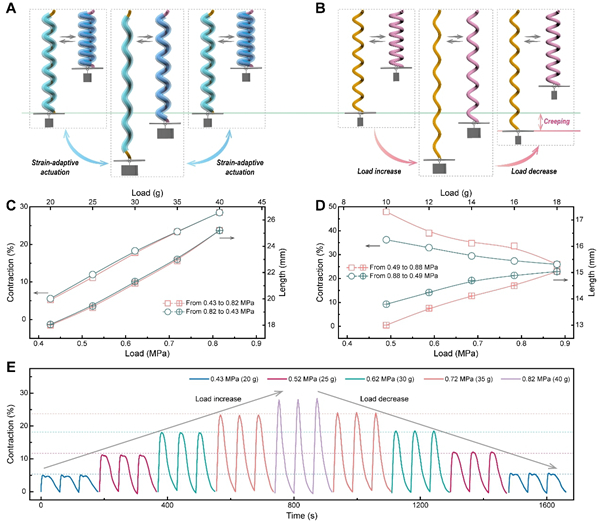
图2 人工肌肉纤维的弹性驱动性能
弹性人工肌肉纤维的驱动性能优异,其最大收缩行程、做功能力和平均功率密度分别为54%、590 kJ/m³和~80 W/kg,分别是天然肌肉的2.7倍(~20%)、73.8倍(8 kJ/m³)和1.6倍(50 W/kg)。不仅如此,人工肌肉纤维在最大驱动量为54%时还实现了稳定的自传感路径追踪功能。
图3感知-驱动一体化弹性人工肌肉纤维工作过程
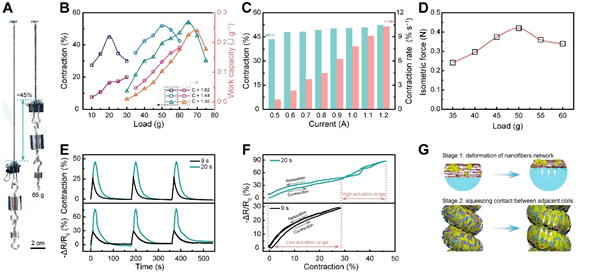
图4 感知-驱动一体化弹性人工肌肉纤维的电热驱动和实时路径追踪性能
扑翼飞行器实际飞行测试过程中,人工肌肉纤维基舵机不工作时,拮抗结构保持稳定,飞行器直行。当拮抗结构中右侧纤维收缩时,使得右侧翼膜受力撑开,飞行器发生左转;左侧纤维收缩时,使得左侧翼膜受力撑开,飞行器发生右转。通过控制右侧和左侧纤维依次工作,飞行器可以实现先左转后右转的调控。
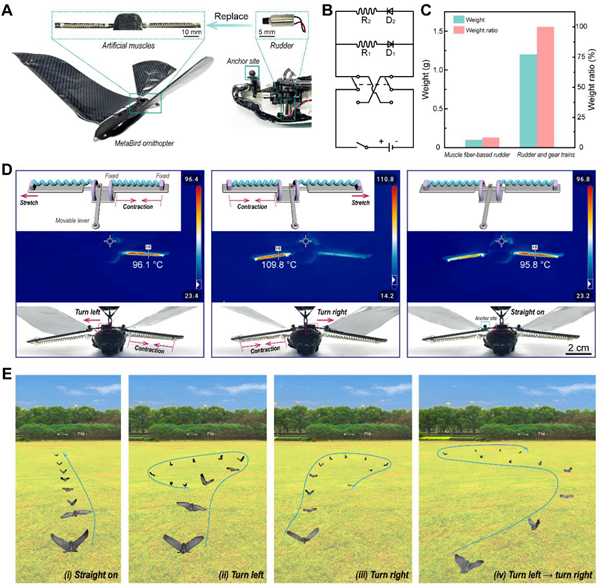
图5人工肌肉纤维基舵机用于扑翼飞行器飞行方向调控应用展示
基于弹性人工肌肉纤维设计的压力带主动施加的最大压力可以达到3 N,短时间工作温度接近38 °C,持续工作温度低于42 °C(人体低温烫伤极限值)。压力带设计了三种预拉伸状态,可适配不同体型人群的需求。假体模型上测试时,三种不同预拉伸应变下主动施加的压力分别为3 N、2.5 N和2 N。
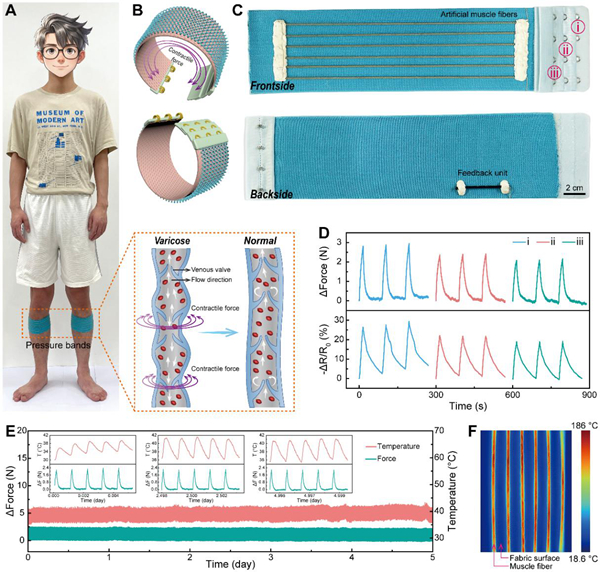
图6 具有压力调节和反馈功能的预防下肢静脉疾病压力带应用展示
相关工作以Elastic-sheathed artificial muscle fibers delivering natural muscle-like resilient actuation for robotics and wearables为题发表在Matter上。论文第一作者是中国科学院苏州纳米所博士后董立忠,通讯作者为邸江涛研究员。该工作得到了国家自然科学基金、国家重点研发计划和江苏省自然科学基金等科研项目的支持。上述工作得到了研究所轻量化实验室的大力支持。近期,双方合作将柔性传感器集成到扑翼飞行器结构件中,实现了飞行器飞行姿态的实时、精确监测与重构,为开发高效能飞行器奠定了良好的基础(Small,2025,21,2501012)。
附件下载: