苏州纳米所邸江涛研究员等在变形织物驱动器研究方面取得新进展
智能主动变形织物是一种新兴的功能材料,在可穿戴织物中具有广阔的应用前景,例如可以自发调整形状增加穿戴舒适度,或是作为助力设备帮助人类更轻松地提起重物。智能变形织物的运动可由多种方式触发,其中由电化学离子触发的变形织物与其它方式相比具备可控性好、变形程度大、电压低、响应快以及热效应不明显等特点,在可穿戴设备中有重要的应用潜力。然而开发电化学驱动变形织物受到液态工作环境的约束,挑战极大。
中国科学院苏州纳米所邸江涛等人最近报道了一种利用电化学驱动仿生肌肉纤维编织而成的主动变形织物。该织物具有驱动电压低和响应速度快的特点,并且可以脱离液态环境在空气中稳定工作。控制织物中的不同区域纤维作动,可以实现织物的整体及局部主动变形。研究者初步展示了该电化学驱动主动变形织物在可穿戴助力织物中的应用潜力。
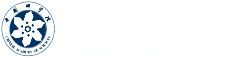
以碳纳米管(Carbon Nanotube,CNT)复合纤维作为仿生肌肉纤维的原材料。首先他们发展了仿生肌肉纤维的连续制备技术,通过控制不同阶段中喂线、加捻与收卷等部分之间的相对速度,连续制得了米级长度的芯-鞘复合CNT@nylon螺旋纤维(图1a-f)。该纤维结构均匀,且具有优异的柔韧性与可编织性,在编织过程中螺旋结构不被破坏(图1g-i)。
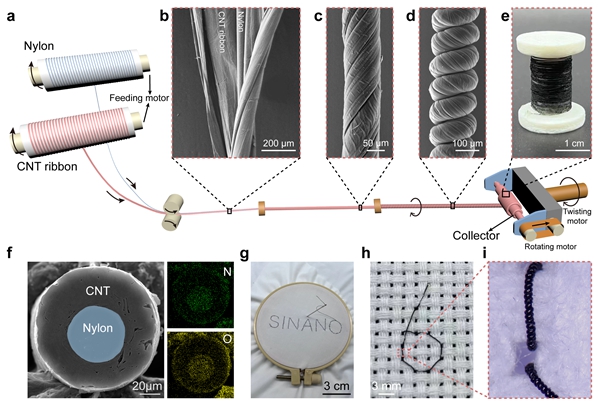
图1. 芯-鞘复合电化学仿生肌肉纤维的连续制备
起电化学驱动活性作用的CNT分布在鞘层,处于纤维芯部的惰性高分子纤维起到了减少昂贵CNT用量的作用。具有芯-鞘结构的CNT@nylon复合纤维为电化学离子提供了更大的比表面积以及更短的迁移路径,这有利于离子在纤维内部更多的注入与更快的迁移,CNT@nylon复合仿生肌肉纤维的驱动量可以达到26.4%(图2)。
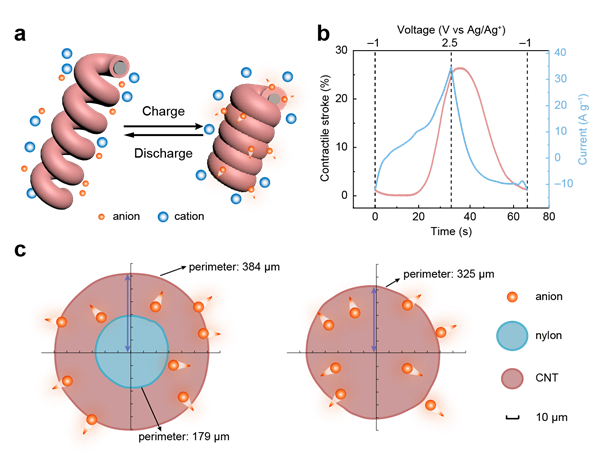
图2. 芯-鞘复合CNT@nylon仿生肌肉纤维的优异驱动性能
基于该仿生肌肉纤维,作者设计了一种可以在空气环境稳定工作的主动变形织物。织物的结构如图3a所示,仿生肌肉纤维与辅助纤维平行编织在柔性织物上分别作为工作电极与对电极。为了防止织物变形过程中两电极之间发生短路,两纤维电极采用上下交错的编织方式。织物中纤维内以及纤维之间的微孔道结构起到吸附并稳定电解液的作用。在工作电极与对电极之间施加电压,织物中电解液的离子迁入工作电极的CNT层进而使得CNT@nylon纤维产生收缩驱动。作者在织物中编织了多组纤维电极对,每组电极对可以单独控制也可以协调控制不同电极对工作。因此,该织物既可以发生整体的收缩也可以发生局部的变形,具有较高的变形自由度,如图3b-c所示。

图3. 电化学变形织物的运动模式
研究者进一步将该电化学驱动主动变形织物进行封装并评估了其作为可穿戴助力织物的应用前景。经过透明柔性薄膜封装后的变形织物具有很高的柔韧性且不发生电解液泄露,其在志愿者手臂上工作时随着电压的施加发生明显收缩,并且在工作过程中织物与手臂之间几乎没有温差(图4)。这表明该电化学变形织物具有可在空气中工作、结构灵活、运动模式可编程以及不产热等重要特性,有望成为下一代可穿戴设备的候选材料。
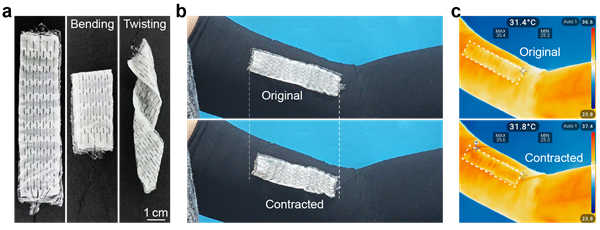
图4. 电化学变形织物作为可穿戴助力设备的应用演示
该成果以Knittable Electrochemical Yarn Muscle for Morphing Textiles为题发表在ACS Nano上,并被期刊选为Supplementary Cover封面论文。论文第一作者为中国科学院苏州纳米所硕士生王晓波,通讯作者为任明博士和邸江涛研究员。该工作得到了国家自然科学基金,国家重点研发计划,中国博士后基金等项目的支持。
附件下载: